ROS(Robot Operating System)
2024. 7. 8. 14:05ㆍLiDAR
✅ ROS

✅ ROS의 개념
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt-key adv --keyserver 'hkp://pool.sks-keyservers.net:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt updatesudo apt install ros-melodic-desktop-fullsudo apt install ros-melodic-rvizsudo sh -c 'echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc'source /opt/ros/melodic/setup.bash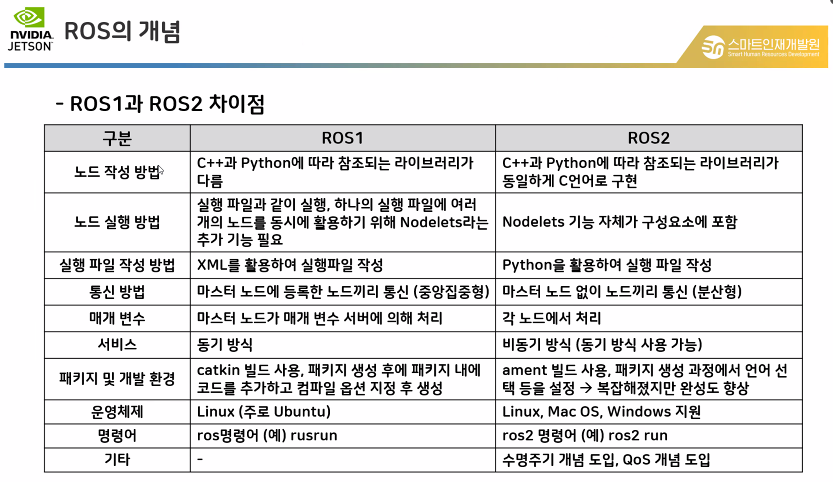
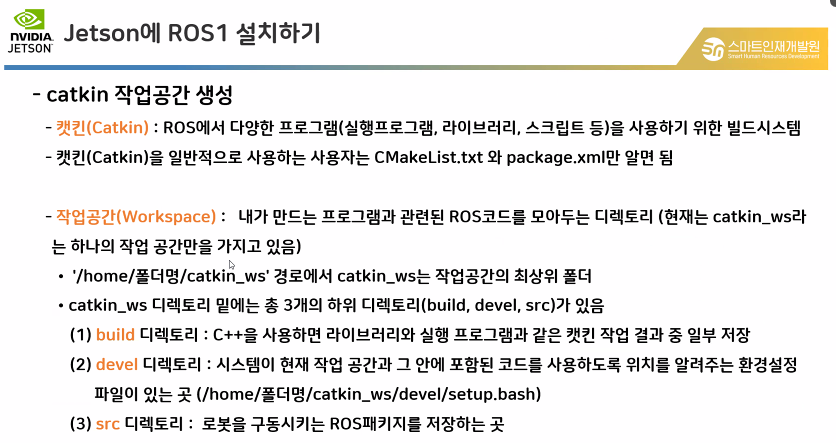
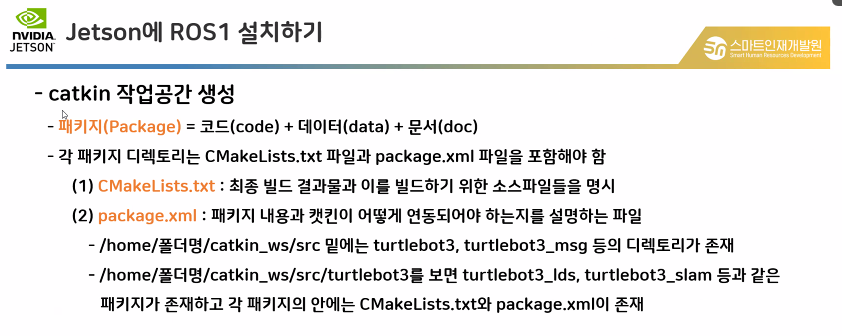
✅ Jetson에 ROS1 설치하기
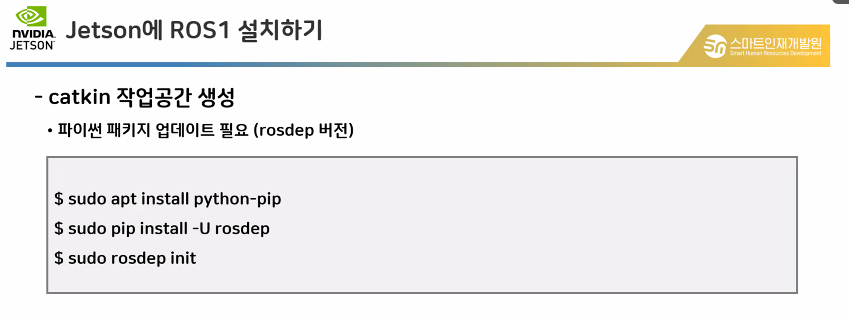
sudo apt install python-pip
sudo pip install -U rosdep
sudo rosdep init
rosdep update
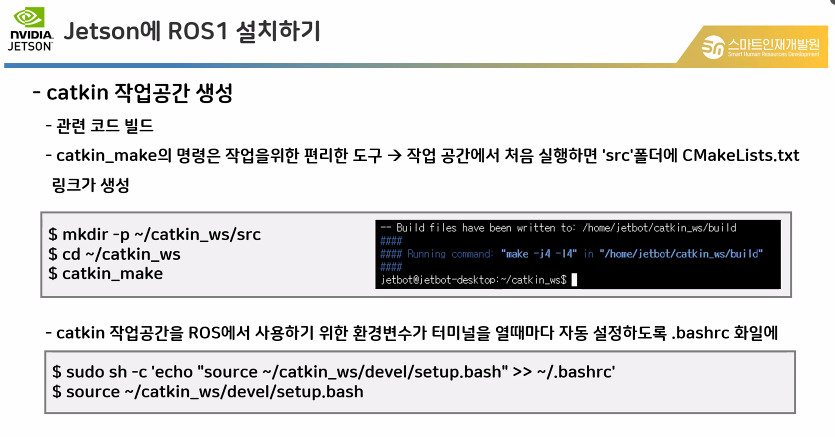
mkdir -p ~/catkin_ws/srccd ~/catkin_wscatkin_make
sudo sh -c 'echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc'source ~/catkin_ws/devel/setup.bash echo $ROS_PACKAGE_PATH
'LiDAR' 카테고리의 다른 글
| LiDAR 센서 이해하기 (0) | 2024.07.09 |
|---|---|
| RFID (0) | 2024.07.08 |
| Processing (0) | 2024.07.05 |
| I2C 통신 (0) | 2024.07.04 |