RFID
2024. 7. 8. 11:10ㆍLiDAR
✅ RFID


✅ RFID 동작

✅ RFID - RC522



#include <SPI.h>
#include <MFRC522.h>
// 리셋 핀 번호
#define RST_PIN 9
// I2C SDA 핀 번호
#define SS_PIN 10
// 모듈 설정
MFRC522 mfrc522(SS_PIN, RST_PIN);
void setup() {
Serial.begin(9600);
SPI.begin();
// RFID 모듈 초기화
mfrc522.PCD_Init();
// 연결 테스트 : 연결 되었다면 true를 반환
bool result = mfrc522.PCD_PerformSelfTest();
if (result)
Serial.println("Connect !!");
else
Serial.println("Not Commect !!");
}
void loop() {
}
#include <SPI.h>
#include <MFRC522.h>
// 리셋 핀 번호
#define RST_PIN 9
// I2C SDA 핀 번호
#define SS_PIN 10
// 모듈 설정
MFRC522 mfrc522(SS_PIN, RST_PIN);
void setup() {
Serial.begin(9600);
SPI.begin();
// RFID 모듈 초기화
mfrc522.PCD_Init();
// 연결 테스트 : 연결 되었다면 true를 반환
bool result = mfrc522.PCD_PerformSelfTest();
if (result)
Serial.println("Connect !!");
else
Serial.println("Not Commect !!");
}
void loop() {
// 새로운 카드인 경우에만 실행
if (!mfrc522.PICC_IsNewCardPresent())
return;
// 태그 값을 읽었다면 실행
if (!mfrc522.PICC_ReadCardSerial())
return;
byte letter;
// 태그 값을 출력
for (byte i = 0; i < mfrc522.uid.size; i++)
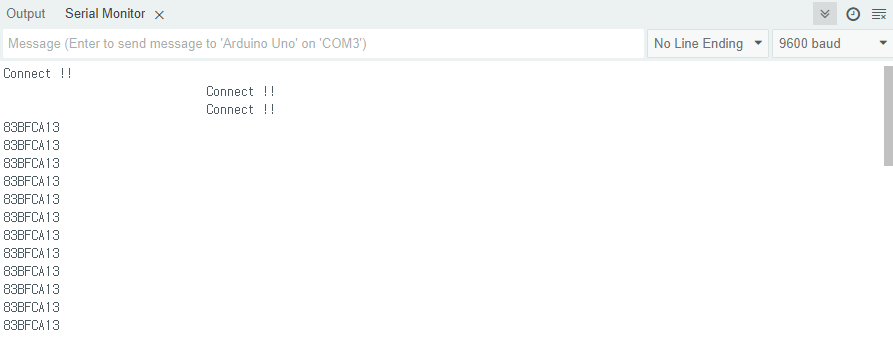
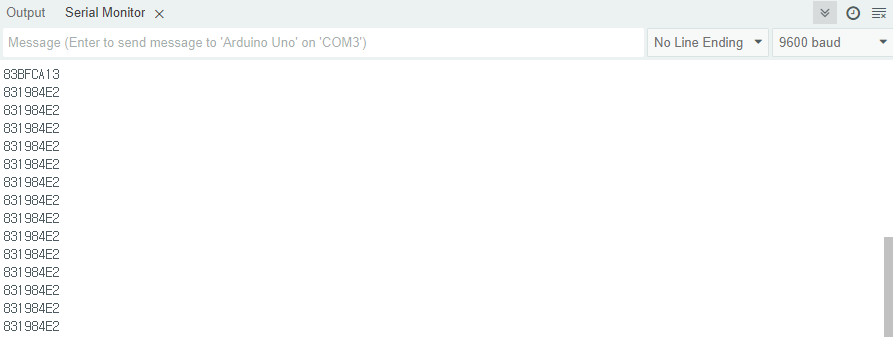
Serial.print(mfrc522.uid.uidByte[i], HEX);
Serial.println();
// 동글란 : 83BFCA13, 카드 : 831984E2
}
#include <SPI.h>
#include <MFRC522.h>
// 리셋 핀 번호
#define RST_PIN 9
// I2C SDA 핀 번호
#define SS_PIN 10
// 모듈 설정
MFRC522 mfrc522(SS_PIN, RST_PIN);
void setup() {
Serial.begin(9600);
SPI.begin();
// RFID 모듈 초기화
mfrc522.PCD_Init();
// 연결 테스트 : 연결 되었다면 true를 반환
bool result = mfrc522.PCD_PerformSelfTest();
if (result)
Serial.println("Connect !!");
else
Serial.println("Not Commect !!");
}
void loop() {
// 새로운 카드인 경우에만 실행
if (!mfrc522.PICC_IsNewCardPresent())
return;
// 태그 값을 읽었다면 실행
if (!mfrc522.PICC_ReadCardSerial())
return;
// byte letter;
String content = "";
// 태그 값을 출력
for (byte i = 0; i < mfrc522.uid.size; i++) {
// Serial.print(mfrc522.uid.uidByte[i], HEX);
// 태그 값을 문자열에 저장 (2byte 데이터를 병합)
content.concat(String(mfrc522.uid.uidByte[i], HEX));
}
Serial.println();
// 동글란 : 83BFCA13, 카드 : 831984E2
// ID를 대문자로 변화
content.toUpperCase();
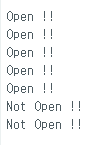
if (content == "831984E2")
Serial.print("Open !!");
else
Serial.print("Not Open !!");
}
'LiDAR' 카테고리의 다른 글
| LiDAR 센서 이해하기 (0) | 2024.07.09 |
|---|---|
| ROS(Robot Operating System) (0) | 2024.07.08 |
| Processing (0) | 2024.07.05 |
| I2C 통신 (0) | 2024.07.04 |