I2C 통신
2024. 7. 4. 15:21ㆍLiDAR
✅ I2C 통신




✅ RFID - RC522

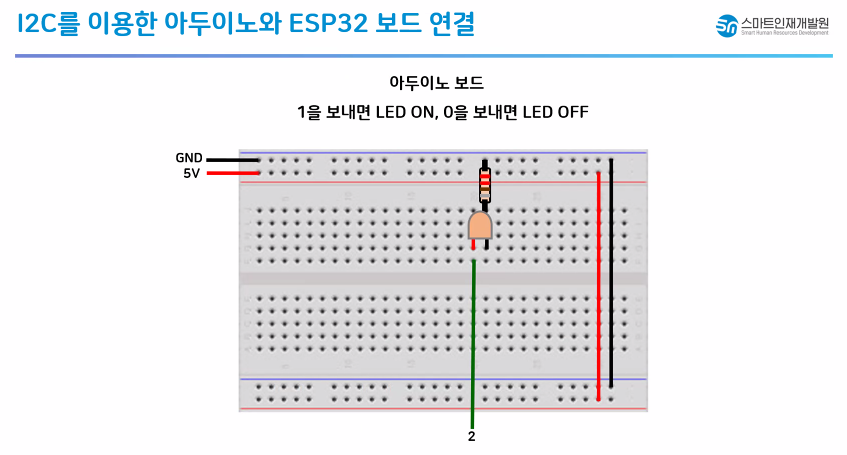
✅ I2C를 이용한 아두이노와 ESP32 보드 연결




#include <Wire.h>
const byte address = 0x3F; // 통신에서 사용할 주소
void setup() {
Serial.begin(9600);
Serial.println("I2C test !!");
Wire.begin(address);
Wire.onReceive(receiveEvent);
}
void loop() {
delay(500);
}
void receiveEvent(int howMany) {
while(Wire.available()) {
char c = Wire.read();
Serial.println(c);
}
}#include <Wire.h>
const byte address = 0x3F; // 통신에서 사용할 주소
void setup() {
Serial.begin(9600);
Wire.begin();
}
void loop() {
if (Serial.available()) {
char c = Serial.read();
Wire.beginTransmission(address); // 통신 주소를 설정한다
Serial.println(c); // 데이터를 슬레이브 장치로 전송한다
Wire.write(c); // 데이터 전송을 종료한다
Wire.endTransmission();
}
}

#include <Wire.h>
const byte address = 0x3F; // 통신에서 사용할 주소
void setup() {
Serial.begin(9600);
Serial.println("I2C test !!");
Wire.begin(address);
Wire.onReceive(receiveEvent);
}
void loop() {
delay(500);
}
void receiveEvent(int howMany) {
while(Wire.available()) {
char c = Wire.read();
Serial.println(c);
}
}

#include <Wire.h>
void setup() {
Serial.begin(9600);
// I2C 통신 초기화 (0을 보냄)
Wire.begin();
for (byte i = 1; i < 120; i ++) {
Wire.beginTransmission(i);
// I2C 통신이 연결 중이라면
if (Wire.endTransmission() == 0) {
Serial.print("Address : ");
Serial.print("0x");
Serial.println(i, HEX);
delay(10);
}
}
}
void loop() {
}
#include <Wire.h>
const byte address = 0x3F; // 통신에서 사용할 주소
void setup() {
Serial.begin(9600);
Wire.begin();
}
void loop() {
int val = analogRead(2);
Wire.beginTransmission(address);
Serial.println(val);
Wire.write(val);
Wire.endTransmission();
delay(1000);
}
#include <Wire.h>
// #include <LiquidCrystal_I2C.h>
const byte address = 0x3F;
// LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup() {
// lcd.init();
// lcd.backlight();
Serial.begin(9600);
Serial.println("I2C test !!");
Wire.begin(address);
Wire.onReceive(receiveEvent);
}
void loop() {
delay(500);
}
void receiveEvent(int howMany) {
while (Wire.available()) {
char c = Wire.read();
Serial.print(c);
// lcd.setCursor(0, 1);
// lcd.print(c);
}
}#include <Wire.h>
const byte address = 0x3F; // 통신에서 사용할 주소
void setup() {
Serial.begin(9600);
Wire.begin();
}
void loop() {
int val = analogRead(39);
Wire.beginTransmission(address);
Serial.println(val);
Wire.println(val);
Wire.endTransmission();
delay(1000);
}
✅ 2개 이상의 I2C 통신 장치 연결

'LiDAR' 카테고리의 다른 글
| LiDAR 센서 이해하기 (0) | 2024.07.09 |
|---|---|
| ROS(Robot Operating System) (0) | 2024.07.08 |
| RFID (0) | 2024.07.08 |
| Processing (0) | 2024.07.05 |